Physical Experimental
Mine Model
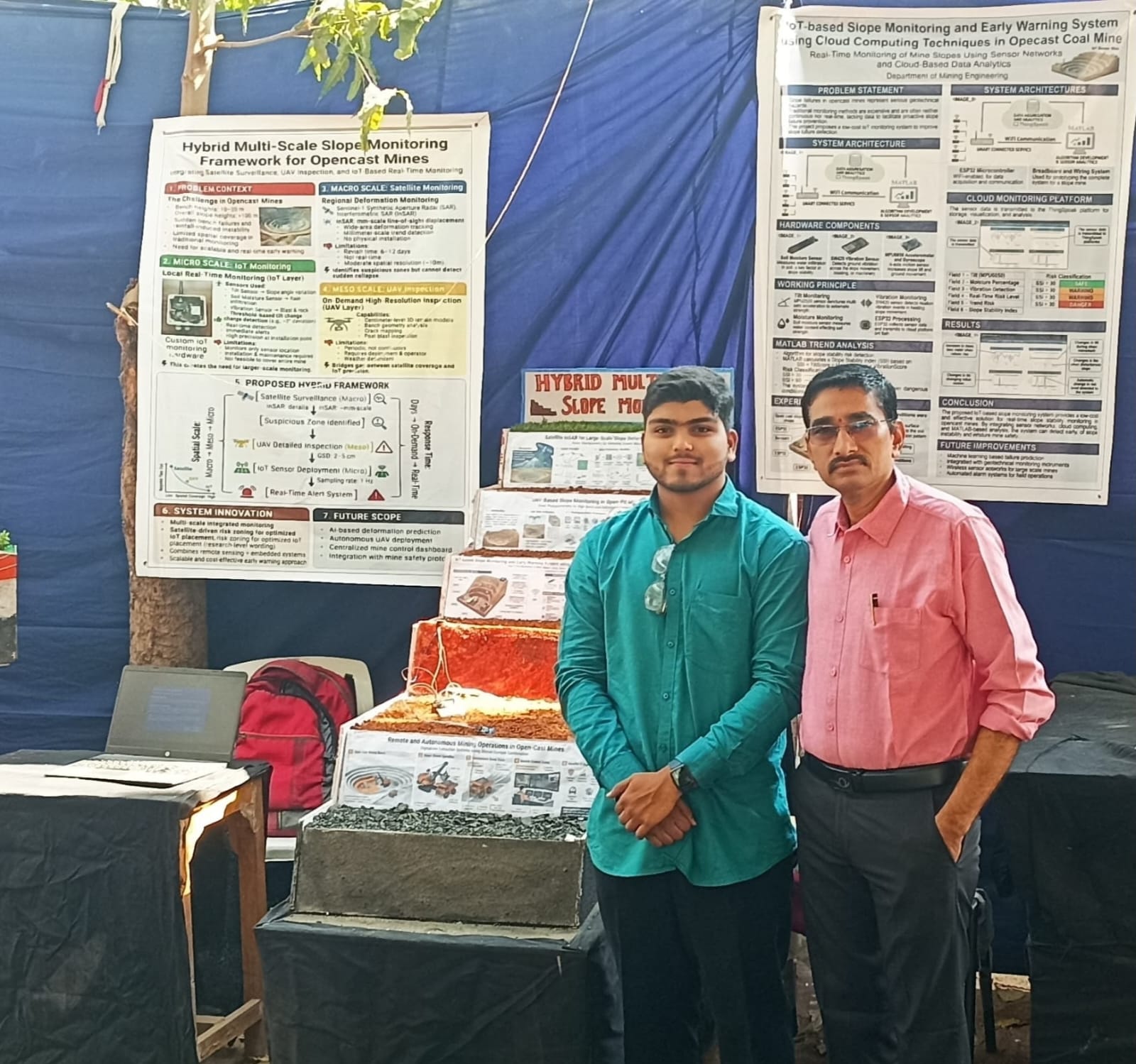
A scaled open-cast mine bench model demonstrating the hybrid monitoring framework under controlled laboratory conditions.
The Physical Model
To demonstrate and validate the Hybrid Multi-Scale Slope Monitoring Framework, a physical scaled model of an open-cast mine was constructed in the laboratory. The model replicates the key structural features of a real mine — including multiple excavated benches, slope faces, and waste dump areas.
The model is built at a scale that allows realistic simulation of slope instability conditions while remaining manageable in a laboratory environment. The IoT sensor system (ESP32 + sensors) is physically installed on the model, just as it would be deployed on a real mine slope.
Each bench of the model is designated to represent a different aspect of the monitoring framework, making the model a complete educational and demonstration tool for the entire hybrid system concept.
Four-Bench Model Configuration
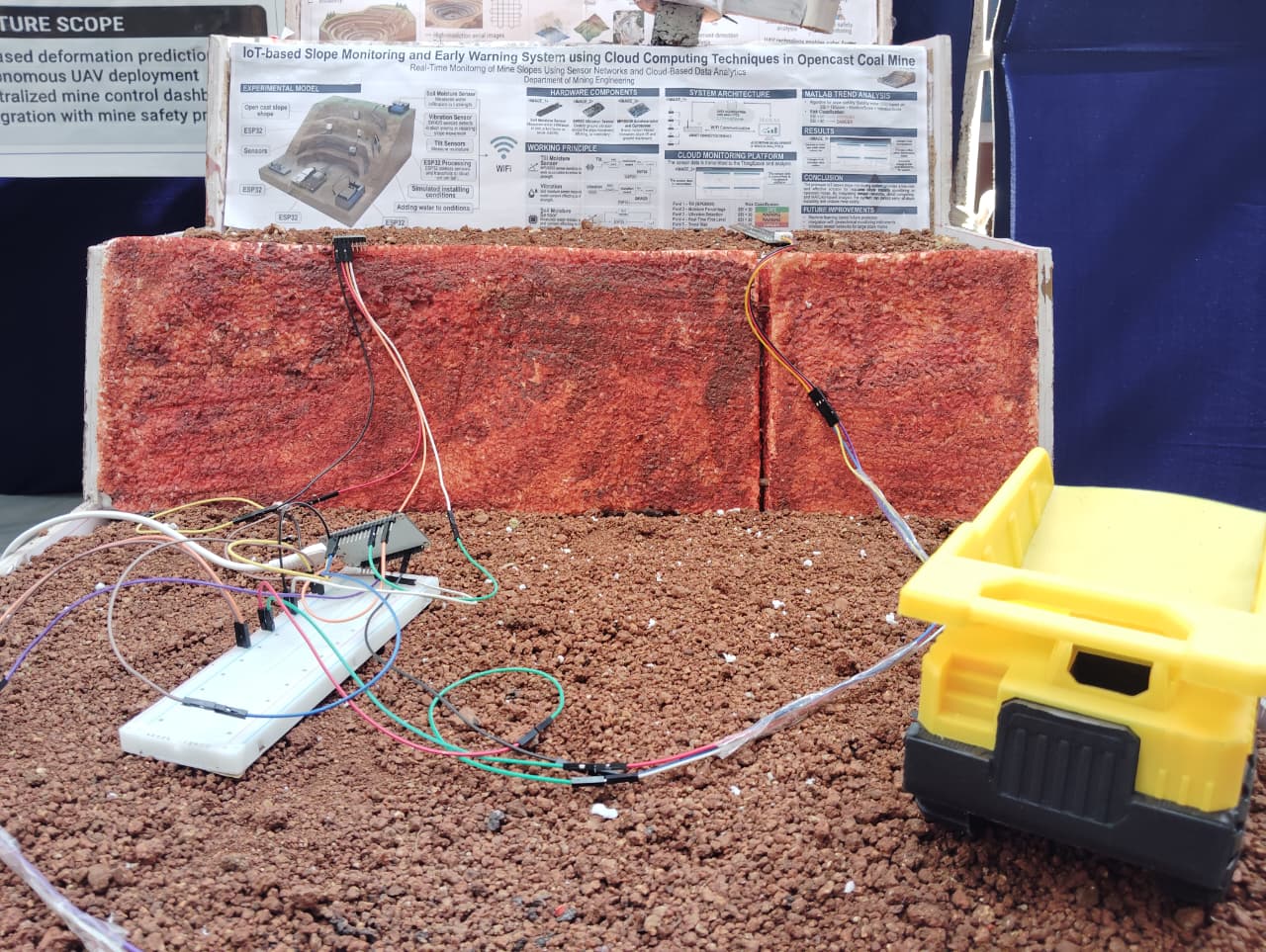
The primary IoT sensor deployment bench. The ESP32 microcontroller and all three sensors (MPU6050, soil moisture, SW420) are installed here. This bench is used for all active slope instability simulations and real-time monitoring demonstrations.
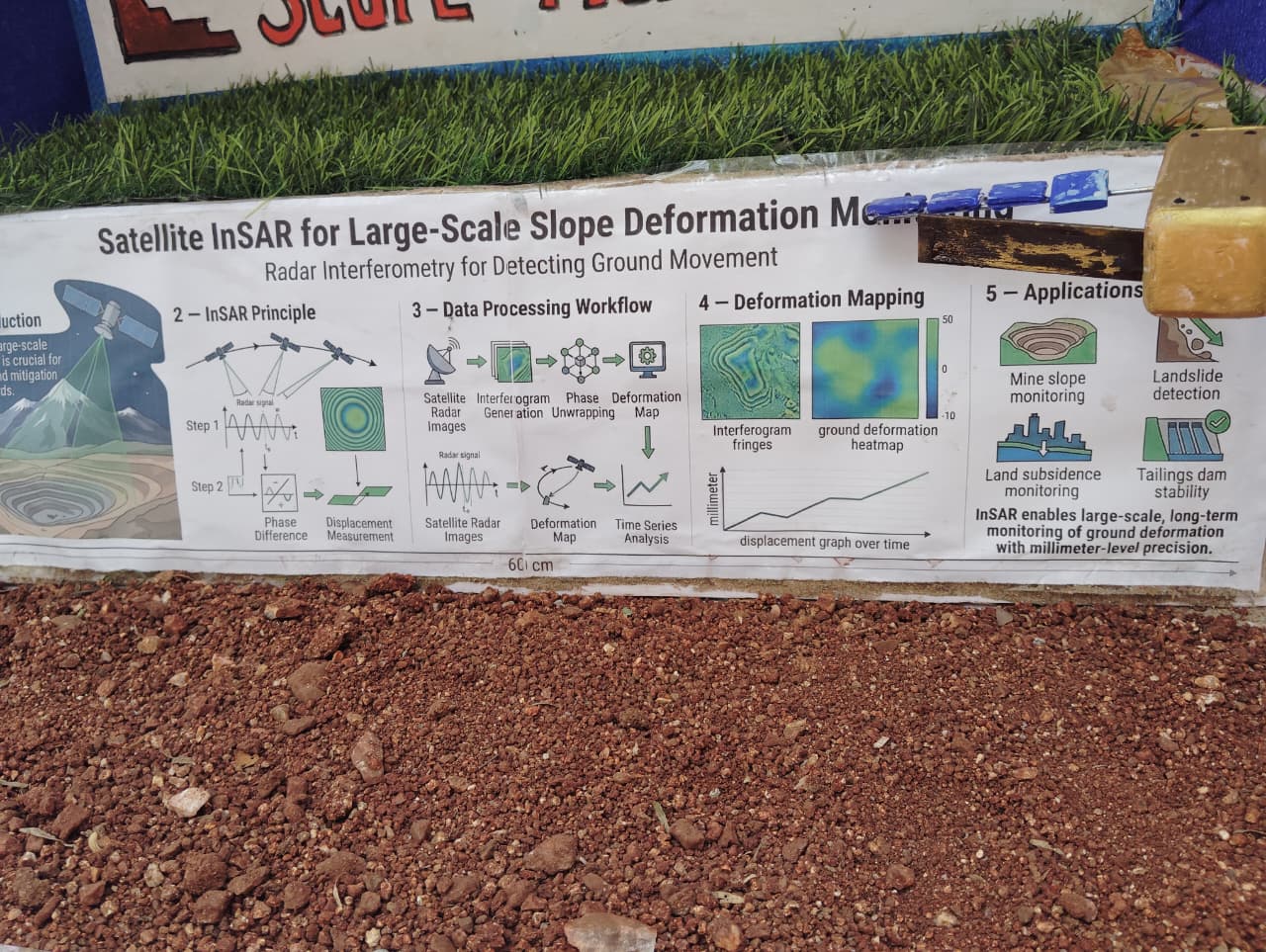
Dedicated to explaining and visualizing the Satellite InSAR monitoring concept. Displays InSAR deformation map examples, satellite orbit diagrams, and explains how radar interferometry detects ground movement at the macro scale.
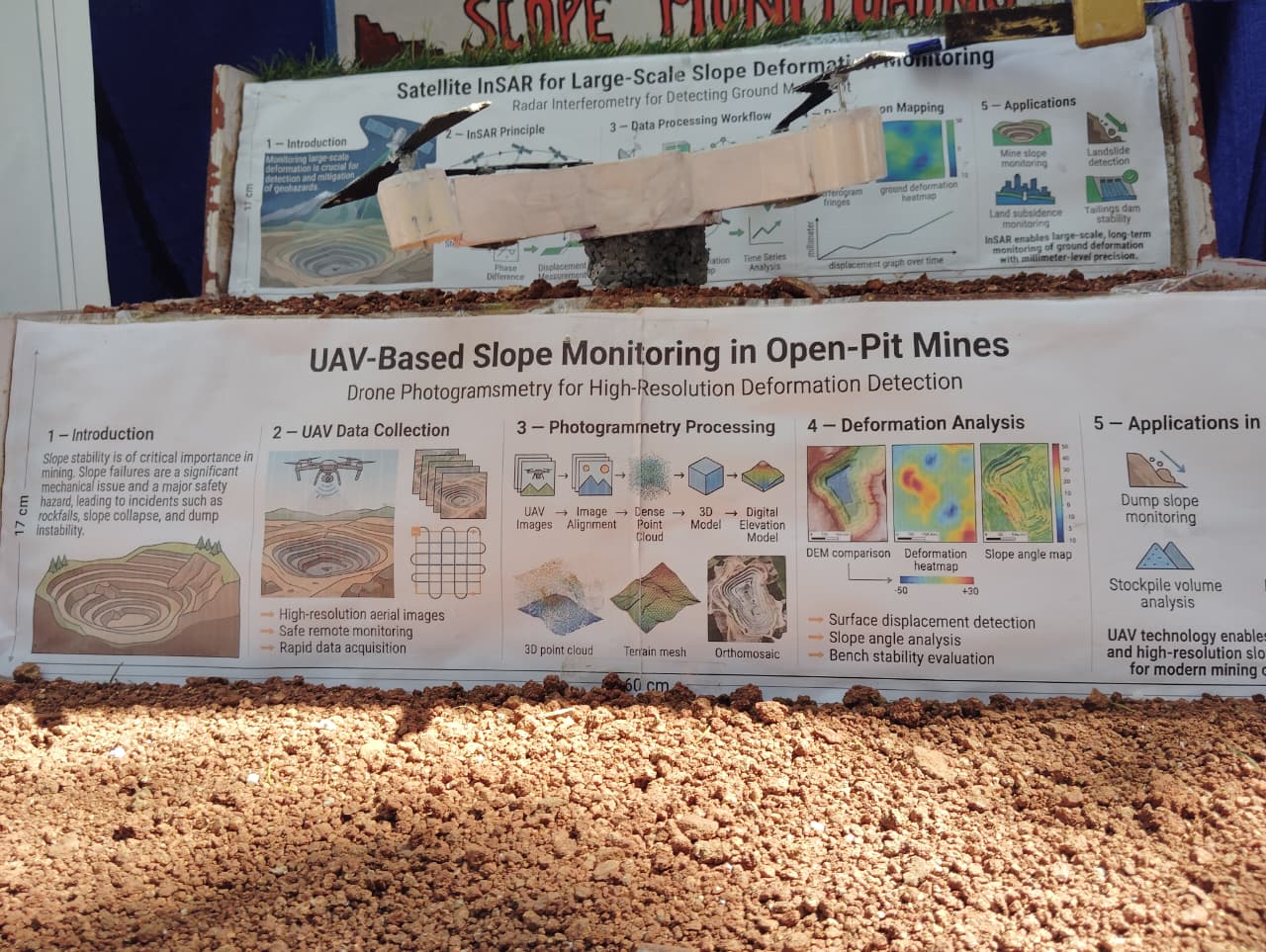
Represents the UAV photogrammetry monitoring layer. Displays sample 3D point clouds and Digital Elevation Models generated from drone surveys. A UAV model may be physically present to illustrate flight patterns and survey methodology.

Illustrates the future vision of autonomous mining operations integrated with the monitoring framework. Represents automated equipment, remote operation centers, and AI-driven mine management — contextualizing where this monitoring technology is heading.
Instability Simulation Scenarios
Three controlled scenarios were used to test and validate the IoT monitoring system's response to different slope failure triggers.
Scenario 1: Tilt Simulation
The slope surface of Bench 1 is physically tilted by incrementally rotating the model base platform. The MPU6050 sensor detects the changing tilt angle in real time.
Scenario 2: Water Infiltration
Water is gradually added to the soil sample on Bench 1 to simulate rainfall infiltration and rising groundwater table. The soil moisture sensor tracks the increasing saturation level.
Scenario 3: Vibration Event
Mechanical vibration is applied to Bench 1 to simulate a blasting event or ground movement. The SW420 vibration sensor detects the disturbance and triggers an event log entry.